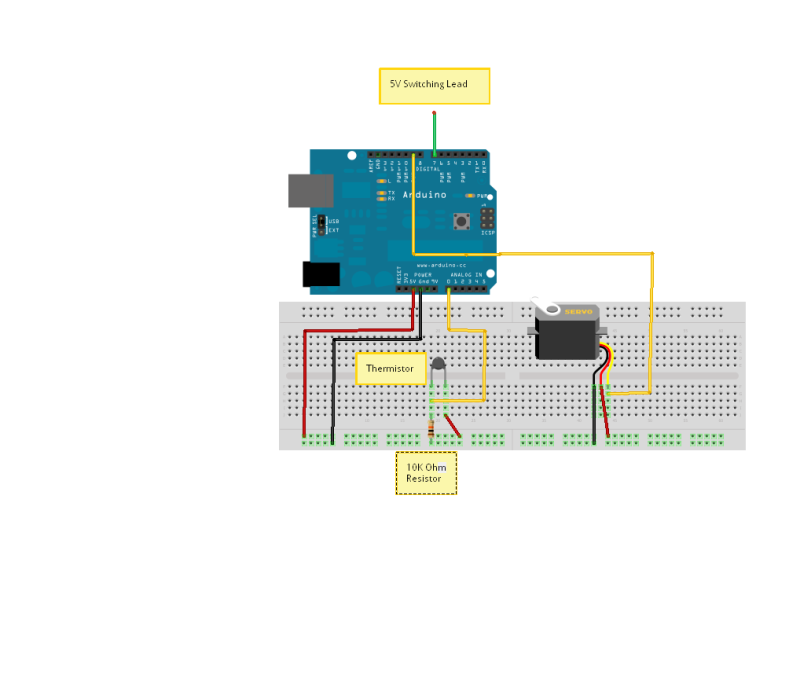
Alright, I've got this program down pat for my servo controller:
when I take power away from pin 7 the servo is to go to a preset position. It does this, but it jitters before it goes. once its there its ok. anyone have any ideas?Code:// Controlling a servo position using a temperature sensor // by Michal Rinott <http://people.interaction-ivrea.it/m.rinott> // edited 5-12-2010 by Will Lyon to include base setting for servo if voltage not detected on pin 7 #include <Servo.h> #define CONTROL 7 Servo myservo; // create servo object to control a servo int temps = 0; // analog pin used to connect the temp sensor int val; // variable to read the value from the analog pin void setup() { pinMode (CONTROL, INPUT); // sets the control pin to input myservo.attach(9); // attaches the servo on pin 9 to the servo object } void loop() { val = digitalRead(CONTROL); //read input of pin 7 and store it if (val == HIGH){ // reads whether or not 5v is present on pin 7, if 5v present, continue: val = analogRead(temps); // reads the value of the temp sensor (value between 0 and 1023) val = map(val, 350, 700, 75, 105); // scale it to use it with the servo (value between 0 and 180) myservo.write(val); // sets the servo position according to the scaled value delay(25); // waits for the servo to get there } else { if (val == LOW); // if no voltage present on pin 7, continue myservo.write(50); //sets servo position to 50 if no voltage is detected on pin 7 } }

 Reply With Quote
Reply With Quote